こんにちは、ティアフォーで安全に関して担当している新宅と申します。今回は、全国で進めている実証実験を「安全」に進めるためのリスクアセスメントの活用についてご紹介します。実証実験に限らず、安全を担保することは自動運転車両を開発する上で必要不可欠であり、社会受容性を高めていくための最も重要な要素の1つとなります。
なお、ティアフォーでは「自動運転の民主化」をともに実現していくエンジニアを募集しています。今回ご紹介する安全だけではなく、様々なバックグラウンドをお持ちの方と開発を進めていく必要があります。下記ページから募集職種のリストをご覧いただき、興味を持った方はぜひお気軽にご連絡ください!
安全に関わる最近のデータや動き
リスクアセスメントについてお話する前に、安全に関わる最近のデータや動きについてご紹介します。
年間の交通事故死者数
2021年1月4日、警察庁が2020年の交通事故死者数は前年よりも376人少ない2,839人だったことを発表しました。この数字は、4年連続で戦後最小を更新し、かつ初めて3,000人を下回ったとのことです。
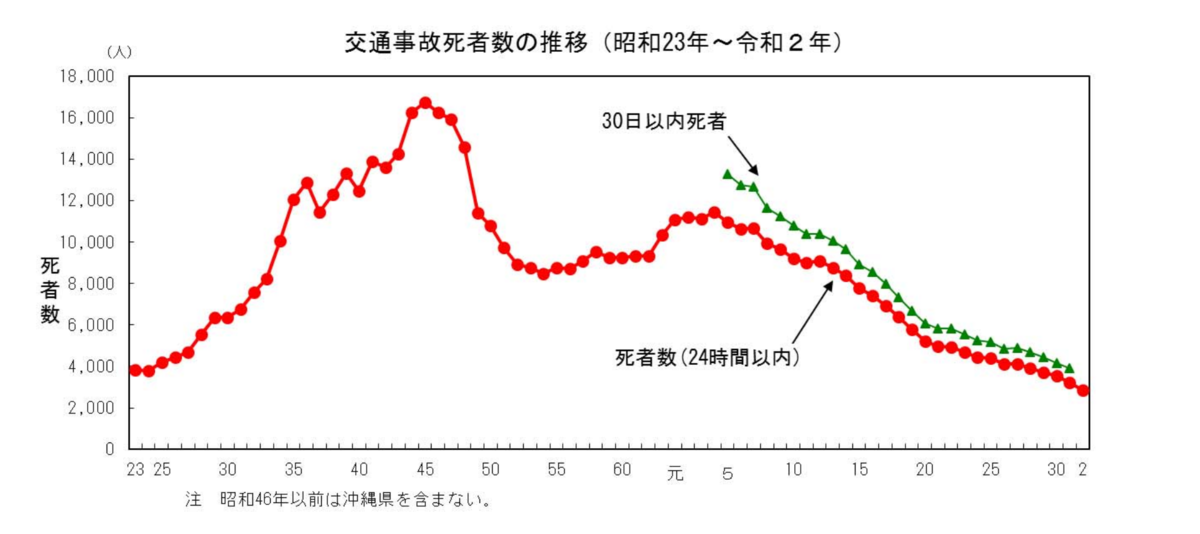
この数字を見て、本記事を読んでいただいている皆さまは多いと思うでしょうか?それとも戦後最小を更新し続けているのだから少ないと思うでしょうか?おそらく皆さまそれぞれの感覚があるかと思います。しかし、1つはっきりしていることは、交通事故の数が限りなくゼロに近づけば同時に交通事故死者数も減っていきます。自動運転が普及することの意義の1つには、交通事故の数が限りなくゼロに近づいていくことにあります。一方で、仮に全て自動運転車になれば事故の数はゼロになるのでしょうか?不慮の事態を考慮すると、残念ながら自動運転が実現しても事故の数がゼロになるとは言えません。それでも、事故の数を限りなくゼロにすることを目指すべく、自動運転車の開発を進めています。これをエンジニアリング観点で言えば、許容可能なリスクの発生確率や損害の程度を定量的に定め、総合的に許容可能な範囲を決めながら安全な設計を行っています。
自動走行の実現に向けた国の直近の動き
3月はじめに、「自動走行ビジネス検討会」から「自動走行の実現及び普及に向けた
取組報告と方針」Version5.0の概要案が示されたのでこちらも簡単にご紹介します。
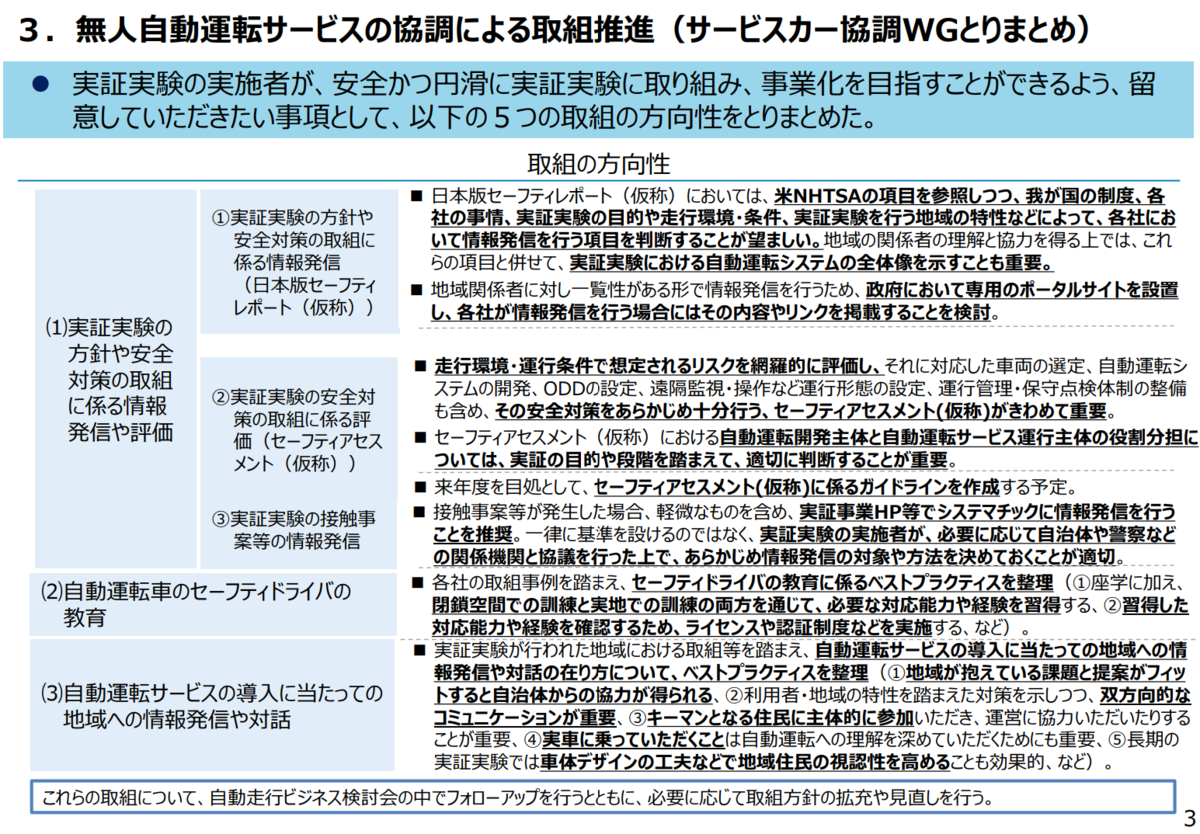
特に(1)では、本記事の主題である安全に関する記載があります。ここでは、米国NHTSA(運輸省道路交通安全局)の項目を参照しながら日本版セーフティレポート(仮称)と称して情報発信することの重要性を示し、さらに「走行環境・運行条件で想定されるリスクを網羅的に評価し、その安全対策をあらかじめ十分に行う、セーフティアセスメント(仮称)がきわめて重要」*1と判断しており、今年度を目途にセーフティアセスメント(仮称)に係るガイドラインが作成される予定となっています。また本概要案では、2025年度までに40か所以上で自動運転レベル4の無人自動運転サービスを実現する旨の記載もあり、今後5年以内に自動運転レベル4の普及が進んでいくことが考えられます。
米国NHTSAの項目について興味のある方は、https://www.nhtsa.gov/document/automated-driving-systems-20-voluntary-guidanceをご参照ください。また、エンジニアリング観点での「安全」については、安全への取り組み:②自動運転の安心・安全について - Tier IV Tech Blogでご紹介しているので是非ご覧ください。
ティアフォーの実証実験の安全をリスクアセスメントで担保
さて、昨年の交通事故死者数から自動運転車開発の意義の1つを、そして国でも安全に自動運転車を普及・実現させていくために様々な動きがあることを見てきました。さらに「自動走行ビジネス検討会」では、セーフティアセスメント(仮称)に係るガイドライン作成が予定されている旨お話しましたが、ここからは全国で進めている実証実験を「安全」に進めるためにティアフォーが既に活用している「リスクアセスメント」についてご紹介します。現在ティアフォーでは、異なる観点から「ODDアセスメント」と「走行ルートサーベイ」という2種類の「リスクアセスメント」を行っています。
※ODD:「Operational Design Domain」の略で、「運行設計領域」と呼ばれる自動運転システムが作動する前提となる走行環境条件のことです。
ODDアセスメントとは?
まず、なぜODDアセスメントが必要なのでしょうか?ティアフォーでは下記のような理由からODDアセスメントを実施しています。
- 走行ルートを決める際、車両を走行させることなく自動走行の可否を事前に把握するため
- 走行限界を超えている箇所について、事前の対策を行うことが出来るため
- アセスメントの結果をドライバーやオペレータに周知することで、より安心・安全な走行を実現するため
- アセスメントの結果を活用し、運用面でのリスクを可視化するため
実施にあたっては地図・走行経路、ODDユースケース、Pilot.Auto性能仕様、シミュレータ実施結果を使用します。それでは、ここからODDアセスメントの実施方法をご説明します。
ODDアセスメントの実施方法
- コースの細分化
下図のように、コースをODDカテゴリに分割してロードセクション番号を付加し、ロードセクション単位で評価を実施していきます。

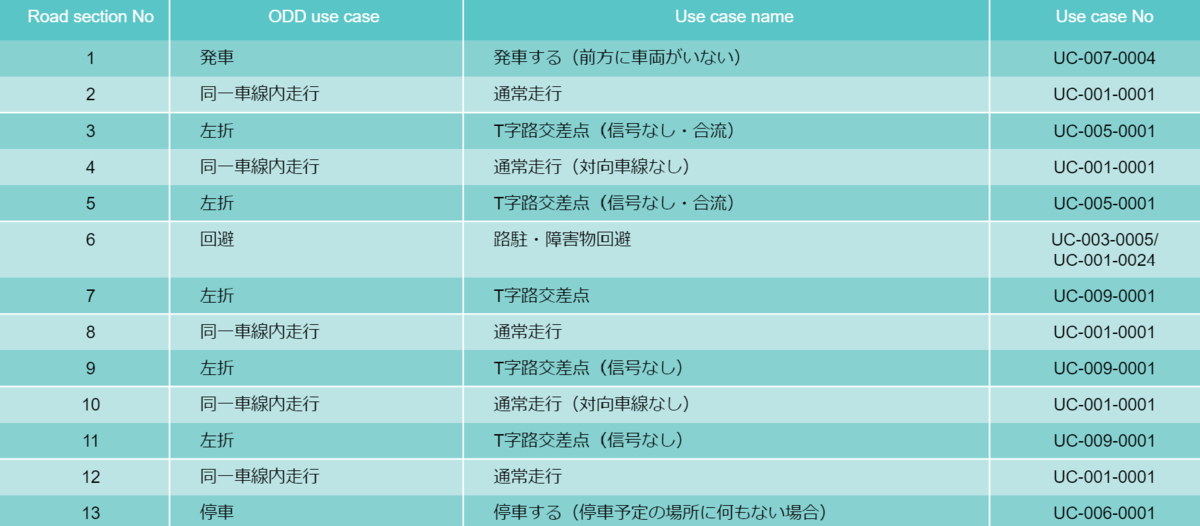
- 各ロードセクションごとにユースケース定義を割当
次に、各ロードセクションにおけるユースケース分析を行います。例えば、下図のように大枠として発車、同一車線内走行、右折、左折などとし、そこから同一車線内走行-通常走行(対向車線なし)や、左折-T字路交差点(信号なし)などのユースケースに当てはめていきます。
- シナリオによる検証確認
ロードセクションごとにユースケース定義を割り当てたら、ロードセクションのユースケースにおけるシナリオのシミュレーション・実車での検証結果の確認を行います。 - 各ロードセクションの評価
そして各ロードセクションの評価をしていきます。下図のように、これまで行ってきたシナリオ総数とそのシナリオを検証した結果のNG数の割合である「性能限界率」を算出します。さらにそれだけでなく、「ODD範囲(=人的介入が必要なのか、もしくは誘導員を配置するなど運用面の対策やそもそもソフトウェアの調整が必要なのかといったもの)」、「限界要因(=性能限界に達している要因が自車両によるものなのか、もしくはカットインしてきた車両や工事中の場所を走行する場合など、外部のものなのかといった要因をより細かく見ていくもの)」をそれぞれ4段階に分けた点数付けを行い、合計点数を算出します。
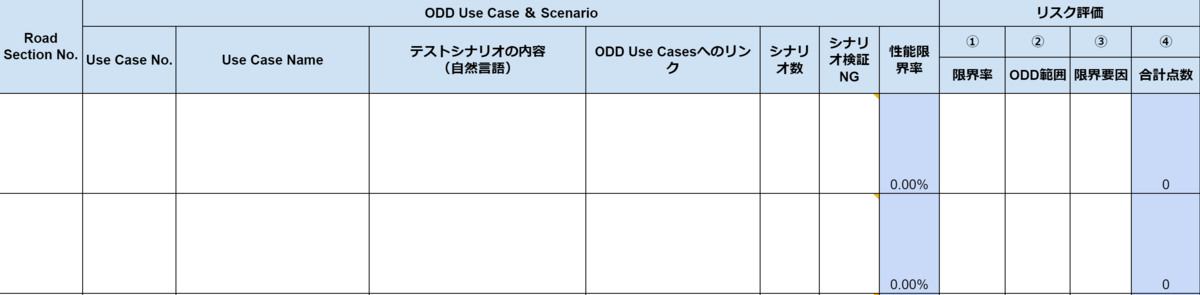
合計点数を算出したら、下表にしたがってリスク評価を行います。点数が高ければよりリスクが高いことを示しており、運行計画の変更を検討していきます。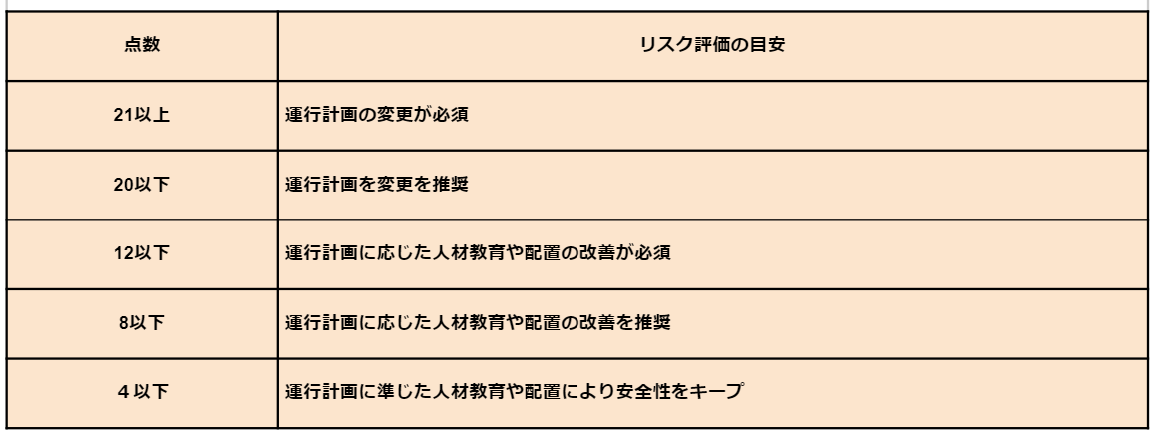
- 評価結果からリスク軽減策の検討・実施
最後に、4.で出てきた結果から安全余裕を確保するよう自動運転計画を修正し、リスクの軽減を図ります。リスク軽減策には、例えば車速の低減やより車間距離を取るなど、性能限界内での運用可能な手段を講じる場合もあれば、オーバーライド(=自動運転から手動運転に切り替えること)により、ルートの一部は必ず手動運転とすることで安全を担保するといった対策があります。下図がその一例となります。
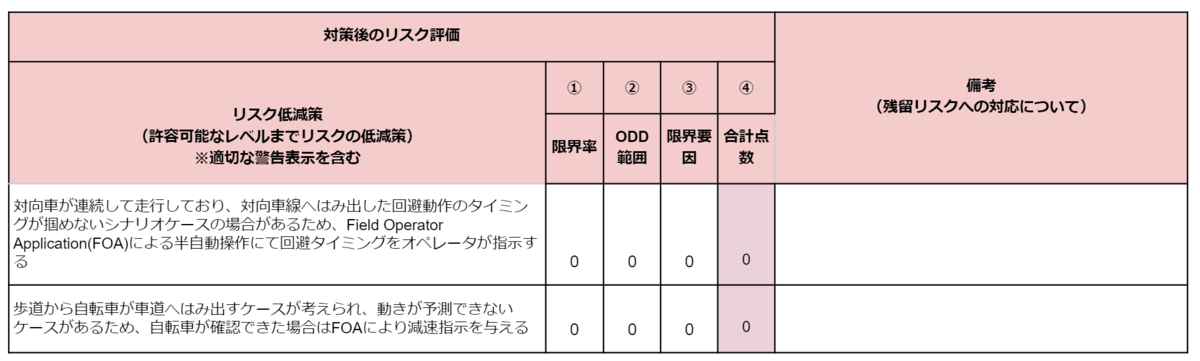
このような一連の流れを経て、ODDアセスメント行っています。リスク軽減策を実施した場合には、改めて評価を行うことでより安全に実証実験が進められるようにしています。
走行ルートサーベイとは?
次に、走行ルートサーベイについてご紹介します。既にご紹介したODDアセスメントと似たようなものではありますが、アプローチの仕方でいくつか異なる点が存在します。異なる2点を中心に走行ルートサーベイについてお話します。
走行環境条件の設定のパターン化参照モデルの活用
これは、「自動走行に係る官民協議会」で日本経済再生総合事務局が策定したもので、「無人自動運転移動サービスの導入を検討している企業・団体等向けに、導入の検討段階において参考となる導入地域の環境や条件についてパターンを整理した」*2ものになっています。無人自動運転移動サービスの実施に向けて「共通言語」として使用することで、より導入の検討が進むことを意図しています。
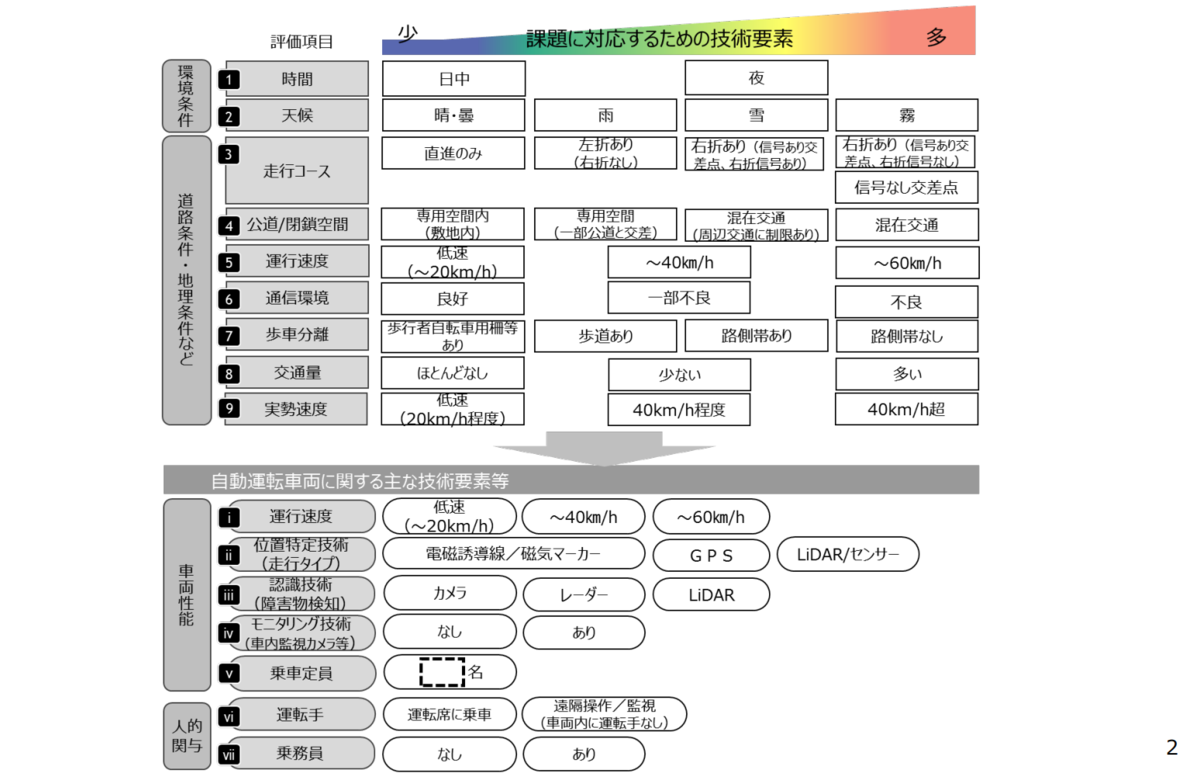
このモデルを参照し、順番に実証実験実施予定地域の走行ルートサーベイを行います。例えば、1番目の時間については、実施予定地域・場所の日の出・日の入り時刻を調べることで、実証実験を安全に行うための開始・終了時間設定の参考にします。また8番目の交通量については、自治体から情報提供いただき、その道路の交通量を可視化(例:〇〇台/24時間など)することで、安全に実証実験を進めていくルートを策定する参考にします。自動運転の技術力を上げていくため、時にはチャレンジングなルートを策定することもありますが、先ほどご紹介したODDアセスメントと合わせて確認していくことで、チャレンジングでありながらも、安全を最優先して実証実験を行っています。
保険会社の事故データの活用
さらに、保険会社の事故データを活用して「事故多発地点」と「うっかり運転地点」を本サーベイの中に含めています。「過去5年間で3回以上事故が起こった地点」を「事故多発地点」、「直近半年間で一時不停止、踏切不停止、速度超過、一方通行違反が起こった地点」を「うっかり運転地点」と定義して「リスクの高い地点」を割り出しています。ご参考までに、「うっかり運転地点」の例を下図に示しています。一時不停止や一方通行違反があることが見て取れます。

実際に起こった事故だけでなく、「うっかり運転地点」まで加えている理由ですが、「ハインリッヒの法則」では「1つの重大事故の背後には29の軽微な事故があり、その背景には300の異常(ヒヤリ・ハット)が存在する」*3と言われており、ヒヤリハットをきちんと分析し、対策を立てることが安全を担保するのに重要であると言われています。これを今回の「うっかり運転地点」に置き換えると、「うっかり運転地点」が発生している場所は「重大事故が起こる可能性がある」ことを示していると言えるので、これらの情報も本サーベイに活用しています。なお、事故データの活用にあたり、ティアフォーがともに「自動運転の民主化」を実現するために連携している損害保険ジャパン株式会社様から提供いただいています。このように、ティアフォーだけでは提供出来ない情報を含めてご案内することで、より安全に対する優先度が高いことをおわかりいただけるのではないでしょうか。
まとめ
今回は、「安全」というキーワードをもとに直近のデータや国の動きをお話し、安全を実現するための「リスクアセスメント」についてご紹介しました。ティアフォーでは、安全を担保しながら自動運転の社会受容性を高めていけるよう引き続き開発を進めていきます。