こんにちは、ティアフォーのフィールドインテグレーションチームに所属している帯津です。今回は2021年3月29日から4月13日の期間で、茨城県筑西市にある道の駅「グランテラス筑西」と周辺地域で実施しました、小型自動搬送ロボットの実証実験の概要と小型自動搬送ロボットならではの実証ポイントについてご紹介します。
なお、ティアフォーでは、自動運転の安心・安全を確保し「自動運転の民主化」をともに実現していく、様々なエンジニア・リサーチャーを募集しています。もしご興味があればカジュアル面談も可能ですので以下のページからコンタクトいただければと思います。
実証実験概要
小型自動搬送ロボットの実証実験を行う背景には大きく分けて2つの理由があります。1つ目は、eコマースの普及にともなう物流量の増大や施設管理の大規模化が進み、対応する人手不足が深刻化しているため、2つ目は新型コロナウイルス感染症拡大にともない、新しい生活様式が広まる中、非接触型の配送ニーズが高まっているためです。そして将来的には自動配送ロボットを活用した新たな配送サービスの実現が期待されています。
科学都市であるつくば市を擁する茨城県は、Society 5.0地域社会実装を強く推進、その茨城県配下の筑西市が手をあげ、本実証実験の支援を頂くこととなりました。
概要
本実証実験では、仕様が異なる2台の小型自動搬送ロボット「Logiee」(以下、Logiee)で、下記2つの自動配送を実施しました。
- 道の駅「グランテラス筑西」と周辺農家・民家を結ぶ公道の遠隔監視型配送
- 「グランテラス筑西」施設敷地内における複数地点を結ぶ近接監視型配送
上記2のルートについては、株式会社オプティマインドの配送ルートを最適化する自動配車システム「Loogia」(以下、Loogia)と、ティアフォーの自動運転車両の運行管理サービスFMS(以下、FMS)との連携によるスケジュール配信の実験を行いました。
近接監視型と遠隔監視型
小型自動搬送ロボットの運用では、自動運転システムの監視者はロボット近傍で常時監視するか、ロボットに搭載したカメラの映像を遠隔監視室で常時監視するかによって2つの監視型に分けられ、前者を近接監視型、後者を遠隔監視型としています。
近接監視型は、近接監視者が車両近傍において、車両周囲の状況を目視で随時確認を行うとともに、自動運転OS Autoware(以下、Autoware)の稼働状況も随時確認します。また、システムの異常時や危険を感じた場合は、車両の緊急停止ボタンを押下、手動走行に切り替えての危険回避などを実施し、安全性を確保します。
一方、遠隔監視型は、遠隔監視者が遠隔監視室よりモニターに映し出される車両のカメラ映像および各種情報より車両周囲の状況を確認するとともに、Autowareの稼働状況を監視し、異常が発生していないか監視します。また、必要に応じて緊急停止やシステムへの介入を行い、遠隔コントローラーを操作して危険回避などを実施し、安全性を確保します。
車両コンセプト
前述のとおり、私有地と公道をそれぞれが連携して走行させるため、異なる仕様のLogieeを使用しました。
1つは、公道走行が可能な高スペック自動搬送ロボット『LogieeS-TC』(以下、LogieeS-TC)、もう1つは、私有地での走行に限定した廉価版の自動搬送ロボット『LogieeSS』(以下、LogieeSS)です。
LogieeS-TCは一般消費者向けを想定しており、丸みを帯びたデザインとなっております。また、前後左右に搭載したカメラの映像が遠隔地からオペレータが監視可能であるほか、LogieeS-TCと遠隔室のオペレータ間に内蔵されたマイク、スピーカーを使うことで、通行する歩行者の方への呼びかけ、通話も可能となっています。さらに、商品の受け渡しの際に、オペレータと通話することで、初めて配送サービスを利用する方でも安心して利用することが可能です。事実、実証実験期間中に、地域の子どもたちとLogieeS-TC(このイベントでは「ろーじー」と称していました)が会話し、子どもたちの疑問を「ろーじー」が答えるなど、イメージキャラクターとしての役割も担いました。
一方、LogieeSSはビジネス向け用途を想定しており、今回の実証実験の場となったグランテラス筑西内を走行させるというよりも、一般には目にすることがないバックヤードでの走行を想定しているため、LogieeS-TCと比べて、LogieeSSでは遠隔監視機能、通話機能などはなく、デザインもシンプルです。
ただし、自動走行にフォーカスを当てると、LogieeS-TCとLogieeSSはコンセプト・外観は異なるものの、同一のパワーユニットを使用し、どちらもAutowareをコアアーキテクチャとした自動搬送ロボットです。なお、LogieeS-TCならびにLogieeSSの操舵方式は、後輪2輪の独立制御による差動2輪方式です。差動2輪方式は構造がシンプルである一方、2輪の駆動状況がパス追従性に大きく影響を及ぼします。例えば、2輪のタイヤエアー圧のバランスが異なると、タイヤ中心(回転軸)から接地面(地面)までの距離(タイヤ径)が変化し、直進指示を与えているにも関わらず、エアー圧が低いとタイヤ径が小さくなり、その結果、エアー圧が低い方へ曲がっていく挙動を示します。
そのため、実証実験期間中は、日々の車両点検で、外観チェック、カメラ・センサーの動作確認を実施するとともに、タイヤエアー圧の確認を実施し、安全な運行に努めました。

走行ルート
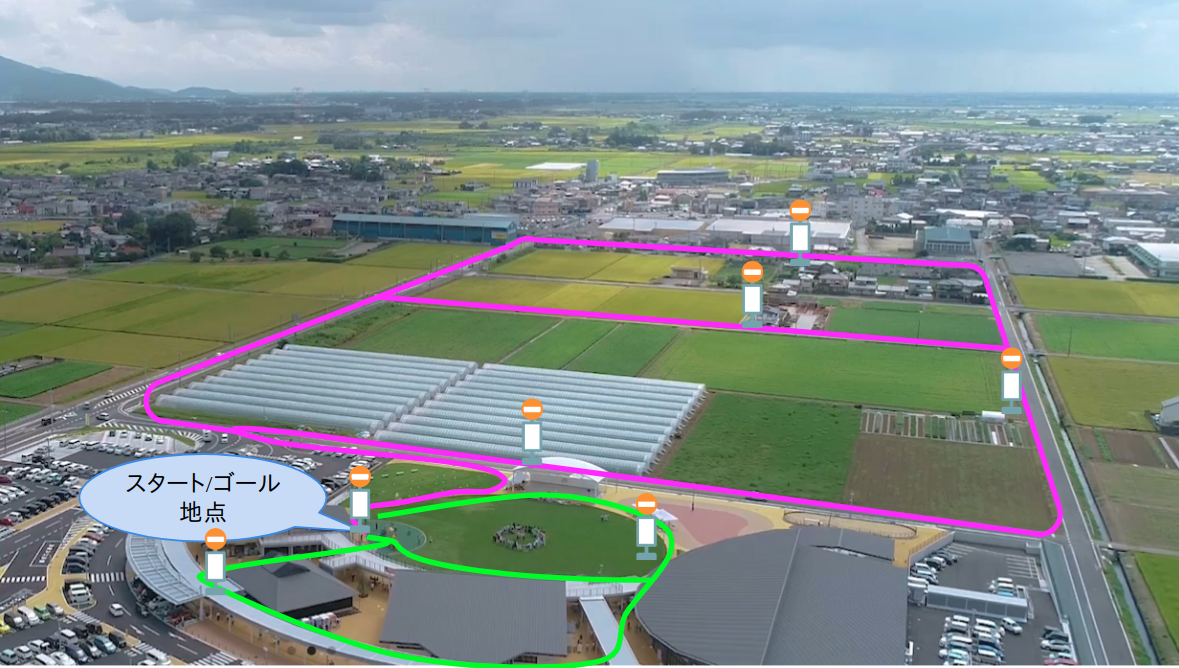
走行ルートは、道の駅「グランテラス筑西」施設内と周辺の公道になります。今回、(A)施設内テナントの商品を地域住民へ配送する、(B)周辺農家から農産物をピックアップし、施設内テナントへ配送する、という2つのシナリオについて実証実験を実施しました。
(A)のルートは、以下の画像の緑のラインで示す道の駅「グランテラス筑西」施設敷地内のルートと、施設内から公道へ出て、周辺民家を周回するピンクのラインを走行するルートに分かれます。
一方、(B)のルートは、最初に公道を走行して農産物をピックアップし、施設へ戻り、その後、施設内テナントへ農産物を配送するルートです。
それぞれの走行ルートでLogieeが停車する箇所を便宜上「バス停」とし、FMSより次に向かうバス停までのルートを配信して各シナリオに即したルート指示を行いました。
ODDアセスメント
Operational Design Domain(以下、ODD)とは、自動運転システムが安全に作動するための前提条件です。あらかじめ定められたODDの範囲内でのみ自動運転システムが作動するように設計することで、走行時の安全性を担保します。
Logieeが安全に走行するためには、上記よりODD設定が必要不可欠で、走行環境や運用方法を制限することで、事故などを未然に防ぎます。
ここで、設定した条件が欠けた場合などODD範囲外となった場合、安全な運行停止措置を行うか、手動運転への切り替えを行い、ODD範囲外となった原因を排除し、ODD範囲内での走行とします。
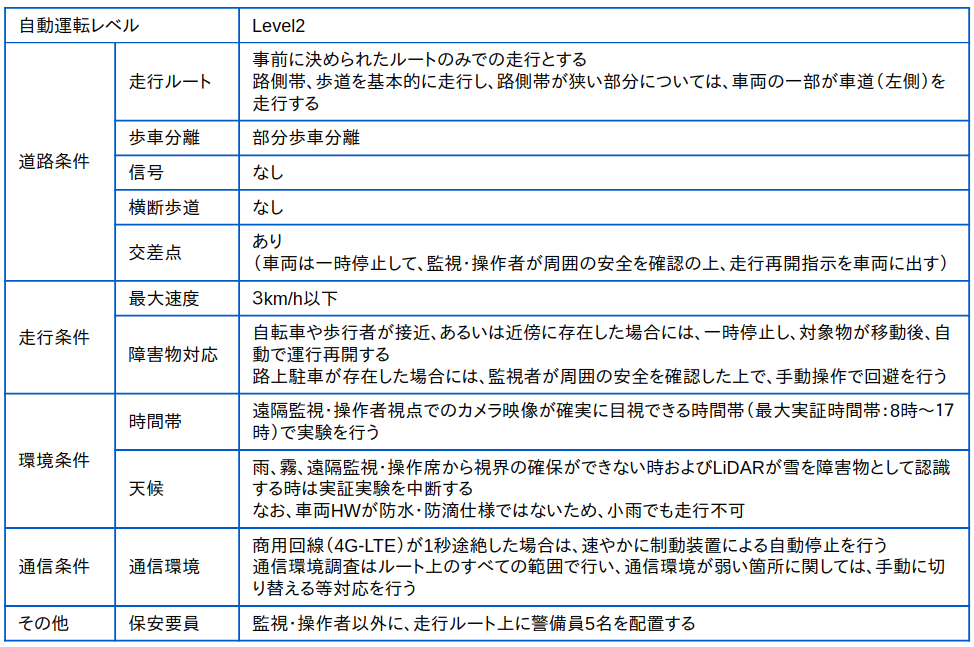
以下は、公道走行におけるODDです。道路条件では、決められたルートのみの走行であることや信号・横断歩道がないため、ODD範囲外となるケースでは、車両(自動車、自転車など)、人の接近がリスクとして挙げられます。
このように、ODD範囲外となるケースを評価していく手法をODDアセスメントとして、事前に評価を実施しました。
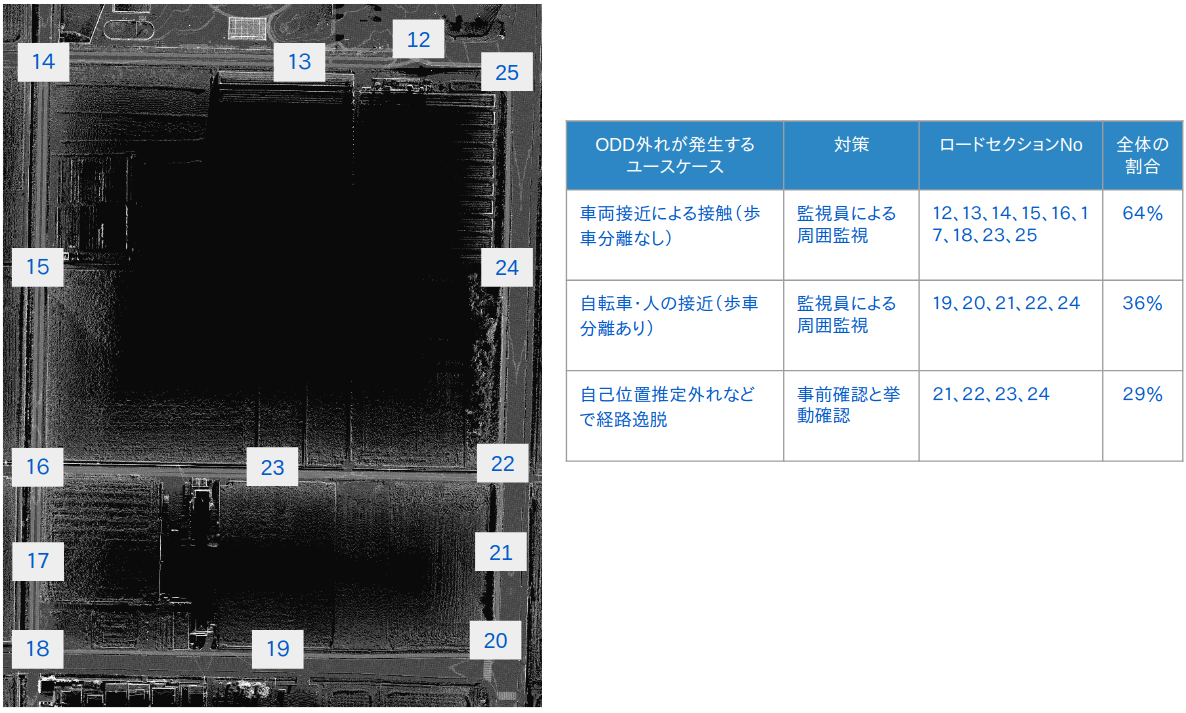
走行ルートとODD道路条件が同一のルート区間(レーンのない道路、歩道、交差点など)をロードセクションと称し、ロードセクションごとにODD範囲外となるケースを割り出し、ODD範囲外となる確率が高いロードセクションに対し、Autowareの機能を維持・制限した状態でAutowareの稼働を継続させるフォールバックや、車両を一時停止させるミニマル・リスク・マヌーバー、手動運転への切り替えを行うなど、運行上の安全を担保する施策を行いました。
以下の図は、公道走行ルートの各ロードセクションにおけるODD範囲外ユースケースと全体に占める割合の評価結果です。(ロードセクションNo.1〜No.11は施設内のため、本稿では割愛致します。)評価結果として、車両接近によるODD外れが大きな割合を占めており、保安要員による監視が安全を担保する上で重要な役割を担うことになります。
そのため、監視・操作者と保安要員とのコミュニケーションプロトコルを定め、監視・操作者からは車両の状況を、保安要員からは接近する人・車情報を伝達することで、ODD範囲外を排除することができました。
オペレーションイメージ
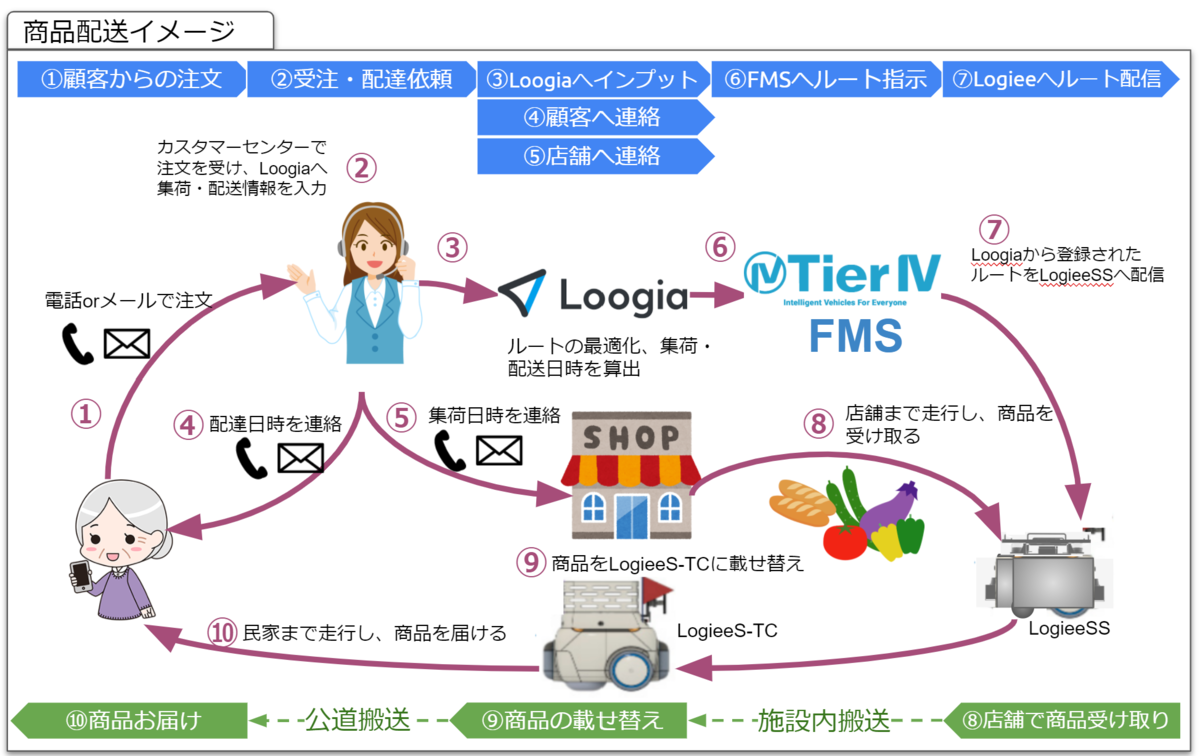
前述のシナリオ(A)、すなわち商品を地域住民へ配送するオペレーションイメージは以下の図のとおりです。
まずは、地域住民から電話orメールでカスタマーセンターへ注文が入ります(①)。カスタマーセンターのオペレータは、Loogiaへ情報を入力すると(②)、Loogiaは最適なルートを割り出し、画面に表示します(③)。オペレータは注文があった住民へ電話orメールで配達日時を連絡します(④)。また、該当商品を取り扱う店舗に対しては電話orメールにて集荷日時を連絡します(⑤)。
集荷先、配送先への連絡後、カスタマーセンターのオペレータは、Loogiaの画面よりルート配信を実行すると、Loogiaは、ティアフォーが開発している配車管理サービスのFMSへ、データインターフェース(API)を通してスケジュール登録を行います(⑥)。その後、FMSはLogieeへルート配信を行います(⑦)。ルート配信を受けたLogiee(今回、施設内走行はLogieeSS)は店舗前まで自動走行し、店舗スタッフより商品を受け取ります(⑧)。その後、商品を公道走行可能のLogieeS-TCへ載せ替えるため、施設内に設定したパーキングロットへ向かいます。向かった先にはLogieeS-TCが待機しているので、LogieeS-TCの隣に駐車し、そこにいる人が商品をLogieeS-TCへ載せ替えます(⑨)。商品を載せたLogieeS-TCは注文のあった住民宅まで公道を自動走行し、商品をお届けします(⑩)。
上記は地域住民へ商品を配送するオペレーションイメージですが、周辺農家から農産物を受け取り、施設内テナントへお届けするオペレーションも同様のイメージです。
なお、FMSの詳細につきましては、以下の記事で紹介しています。
https://tech.tier4.jp/entry/2019/04/05/165349
小型自動搬送ロボットならではの実証ポイント
本実証実験では、2台の仕様が異なる小型自動搬送ロボットで行いましたが、自動運転システムとしてフォーカスすると、自動運転システムのコアアーキテクチャは、公道走行している車両のシステムと同様のAutowareです。このことは、市街地における公道走行が可能なアーキテクチャがLogieeにも採用されていることを指しており、高度な安全性、信頼性をもつ小型自動搬送ロボットとなっています。
一方、運用面のユースケースにフォーカスすると、2台の小型搬送ロボットが同じ場所に到着し、荷物の受け渡しをしやすいようにする必要があったり、公道を走行中に路肩に障害物があれば少し避けたり、遠隔監視走行から近接監視走行へ速やかに切り替え、近接操作者(ロボットの傍で監視を行っているオペレータ)によるマニュアル操作で障害物を回避したい、といった小型自動搬送システムとしての要求が発生します。
これら運用上の要求に対し、Autowareの機能となるパーキング、障害物回避を実証ポイントとして実験を行いましたので、以下にご紹介します。
パーキング
パーキングは、いわゆる駐車することを目的としているほか、LogieeSSが集荷してきた荷物をLogieeS-TCへ積み替えるためのポジショニングを主目的としています。物流業界において、トラックを荷積みのために出荷場所へ駐めるイメージです。
自動走行は地図情報にあるレーン上を走行しますが、パーキングは、レーン上で停止した位置(スタート位置)からパーキングロット(駐車エリア)上の目標位置(ゴール位置)まで移動することができるモード(シナリオ)です。
Autowareではレーン走行(lane driving)、パーキング(parking)の各シナリオを、Planningモジュール内のScenario selectorで、条件判定し切り替えを行います。
Scenario selectorは、レーン上からパーキングロットへ移動しようとした場合にパーキングへ切り替えを行います。
以下の図は、実際に施設内に設定したパーキングロット上まで移動するパス(赤色の線)です。スタートからゴールまでのパスは、Hybrid A*アルゴリズムによるパスプランニングを行うことで生成しています。
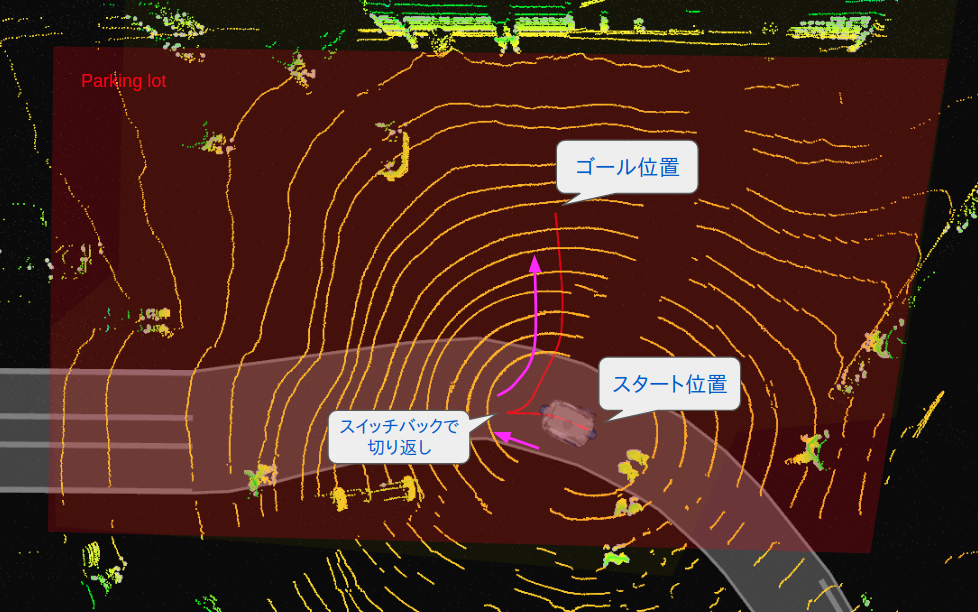
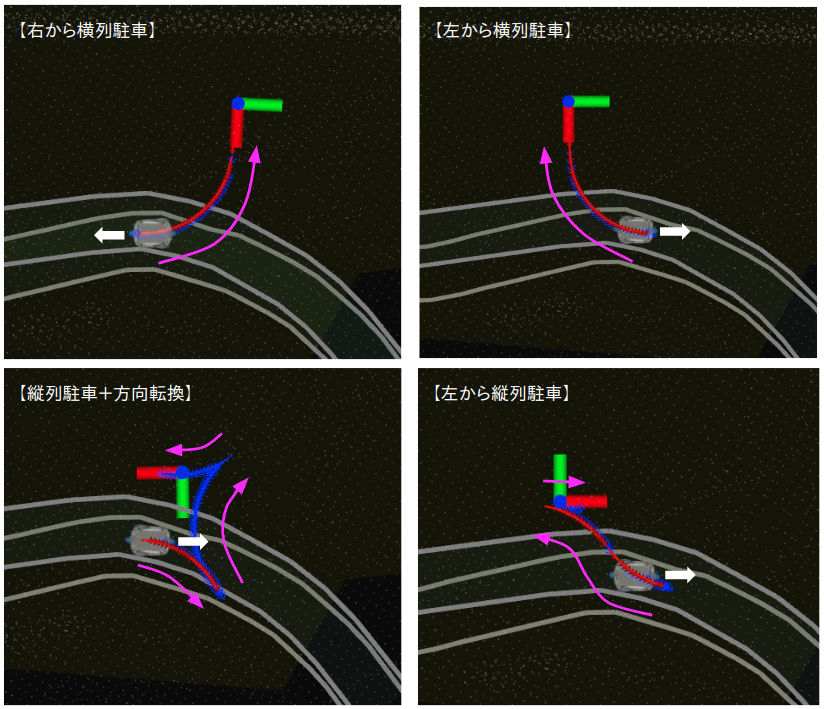
パスプランニングでは、スタート、ゴールの位置、姿勢から横列、縦列の判断、さらに右折、左折、スイッチバック、方向転換などの動作を算出します。
以下の図は、シミュレーターを使用して、さまざまなスタート、ゴールの位置、姿勢に対するパスプランニングを行った結果です。なお、Vehicle model付近にある白い矢印は車両の向き、赤線は算出されたパス、ピンクの矢印は走行方向、青の点がゴール位置で、赤の線がゴール時の車両の向きを示します。
下の写真は、パーキングロットにパーキングさせたLogieeSSとLogieeS-TCで、スタッフが農産物が入った箱の積み替えを行っているデモ風景です。

障害物回避
小型自動搬送ロボットLogieeが障害物回避するユースケースとして、ロボットが走行するレーンに侵入している”もの”の回避があります。ここでいう”もの”とは、駐輪場から少しはみ出した自転車の車輪、置き去りにされたスーパーのカートなど、生活空間における無作為にレーンにはみ出しているものを差します。
これらの”もの”がレーン上にある場合、Logieeは障害物として認識し停止し、近接監視者、あるいは遠隔監視者がLogieeSを手動介入して障害物を回避しますが、Logieeがレーンをはみ出すことなく、ほんの少し避けるだけで”もの”を回避しても走行可能領域内にあると判断できる場合、Autowareは回避動作にともなうパスプランニングを行い、その結果、Logieeは障害物を自動回避します。
このことは、複数台の運行を鑑みた場合、ほんの少し避けるだけで自動走行が可能なケースではLogieeは自動で回避し、レーンを逸脱しなければ回避できない場合のみ手動介入して回避することで手動介入率を下げ、効率的な運行が可能となります。
今回、公道でのレーン幅は1.5mとしており、車両幅が0.75mであるため、左右のマージンは0.375m、理論上では30cmほどレーンに侵入している”もの”を回避できることになります。それ以上の侵入がある場合は、障害物停止となります。
また、物体認識にはLiDARの点群からクラスタリングを行う”Euclidean Clustering”を使用していますが、この手法では、物体全体の形状推定は行っていないことから、1つの物体を複数と認識したり、複数の物体を1つの物体と認識してしまいます。
そのため、走行する場のユースケースにあったパラメータチューニングが必要ですが、今回は、障害物回避の有効性について検証を進めました。
以下の動画は、県道に隣接した歩道で行った障害物(しゃがみこんだ人)の回避の様子です。
実証実験の様子
3/29(月)から現地での実証実験準備を進め、4/2(金)が近接監視走行の警察審査、4/9(金)が遠隔監視走行の警察審査と進めていき、4/12(月)、4/13(火)の2日間がお本番というスケジュールで進めていく中、期間中に多くの方々にお越し頂きました。
以下は実証実験の様子の動画です。
リハーサル、ならびに実証実験本番で、LogieeS-TCは、およそ30回、距離にして30kmの集荷・搬送を、LogieeSSでは、およそ30回、距離にして10kmの配送を実施し、実用化へ向けた課題などを洗い出すことができました。
今後の小型自動搬送ロボットによる実証実験について
冒頭でも触れましたが、昨今の新型コロナウィルス感染症拡大により、宅配サービスが急増し、それにともない、非接触型の配送ニーズが高まっています。
また、政府の成長戦略実行計画(令和2年7月)における低速・小型自動配送ロボットの社会実装に向けて「遠隔監視・操作」型の公道走行実証を実施するとの方針により、宅配ロボット事業へ参入する企業が増加し、実証実験も各地域でさかんに実施されています。
小型自動搬送ロボットにおける配送サービスの実用化には、法整備、インフラ整備など課題は山積みですが、その課題を解決すべく、国が動き出しています。
自動走行では、私たちティアフォー以外にも、大手メーカーが限定的ではあるものの公道での自動運転レベル3、あるいはレベル4の実用化に向け開発を進めていますが、法規制の敷居が高いのが現状です。
一方、小型自動搬送ロボットによる自動走行では、小型、低速(歩行レベル)で、歩道をメインに走行することから、リスクレベルが低く、国内における自動走行の実用化、ビジネスとして収益を得る土壌ができつつあります。
2021年度は、普及へ向けたさらなる拡大が予想されており、私たちティアフォーもパイロット企業となるべく技術改革を進めていきます。
実証実験を終えて・・・
仕様が異なる2種類の小型自動搬送ロボットを私有地、公道を連携して走行させる今回の実証実験は国内初であることから、非常に多くの方々が訪問、見学に来られました。これは、自動配送ロボットを活用した配送サービスに対する地域住民の方々の期待の表れと感じとることができました。
また、地域住民の方々の声を直接聞くことで、自動配送サービスに対する気づきを得ることができました。
実証実験を通して得られた新たな課題は、社内へフィードバックし、より良いサービスの提供、ならびに小型自動搬送ロボットにおける自動運転レベル4の実用化にむけ、さらなる検証・評価を進めていく所存です。