こんにちは、ティアフォーで自動運転システムを開発している川端です。
今回はシステムの性能限界検知と環境センシングに関する取り組みの一部をご紹介します。
1、自動運転レベルとODDによる走行条件定義
【自動運転レベル】
自動運転のレベルはSAEの定義に沿う形で0から5までの6段階に分けられることが主流となっています*1。そのうち、レベル3以上の定義は以下のようになっています。
レベル3(条件付運転自動化)
運転自動化システムが全ての動的運転タスクを限定領域において持続的に実行。この際、作動継続が困難な場合への応答準備ができている利用者は、他の車両のシステムにおける動的運転タスクの実行システムに関連するシステム故障だけでなく、自動運転システムが出した介入の要求を受け容れ、適切に応答することが期待される
レベル4(高度運転自動化)
運転自動化システムが全ての動的運転タスク及び作動継続が困難な場合への応答を限定領域において持続的に実行。作動継続が困難な場合、利用者が介入の要求に応答することは期待されない
レベル5(完全運転自動化)
運転自動化システムが全ての動的運転タスク及び作動継続が困難な場合への応答を持続的かつ無制限に(すなわち、限定領域内ではない)実行。作動継続が困難な場合、利用者が介入の要求に応答することは期待されない
すなわち、レベル4以上の自動運転の実現には、作動継続が困難な場合でも利用者による介入を求めず、自動運転システムが周囲環境やシステムの状態を検知し安全に運行停止措置へ移行する、等の応答が求められます。
では「作動継続が困難な場合」とはどのような場合でしょうか?ここでODDという概念が登場します。
【ODDによる走行条件定義】
ODD*2とは、自動運転システムが作動する前提となる走行環境条件のことで、以下のようにいくつかのカテゴリに分けて考えることができます(参考:Tier IV Safety Report 2020、自動運転LAB)
- 道路条件:高速/一般道路、車線数、車線や歩道の有無など走行する道路に関わる条件
- 地理条件:都市部/山間部/ジオフェンス内など周辺環境も含んで設定する条件
- 環境条件:天候/日照/昼夜/温度など環境に関わる条件
- その他:速度制限/インフラ協調の有無/オペレータの乗車要否/連続運行時間などの運行に関わる1〜3以外の条件
ODDは全ての条件を満たす場合に自動運転システムが正常に作動するように定義されます。例として、先日国土交通省からリリースされた自動運転車(レベル3)に関する発表資料の主な走行環境条件で以下のような記載がありました。
環境条件(気象状況)
強い雨や降雪による悪天候、視界が著しく悪い濃霧又は日差しの強い日の逆光等により自動運行装置が周辺の車両や走路を認識できない状況でないこと
すなわち、上で登場した「作動継続が困難な場合」とは「走行環境が事前に定義されたODDの条件を満たさなくなった場合」と解釈することができます。このようにODDを事前に定義し、その条件の中でシステムを作動させることで、走行時の安全性を担保することが可能となります。
一方で、ODDの極端な例として「悪天候(雨、雪)や霧、逆光を含まない明るい環境」と定義することもできますが、そのような場合には少しでも雨が降ったり、日が傾いて逆光になると(走行条件から外れて)システムが作動できなくなり、自動運転による本来のメリットを得ることが難しくなってしまいます。そのため自動運転システムの設計には、安全性を確保しつつ、同時にシステムの可用性(Availability)も高めていくことが求められています。
以上を簡単にまとめますと、レベル4以上の自動運転を多くの環境で使えるものとしていくためには、システムに対して、
- 時々刻々と変化する走行環境に対してODD条件の評価を行い、外れた場合には縮退運転やMRM*3などの応答を安全に実施できること
- 雨、霧、逆光などを含む様々な走行環境で安全に走行できること
といった要素が求められます。
2、悪天候環境下で生じる課題と環境センシング
日々の実証実験の中で様々な環境や気象条件に遭遇し課題が発生します。
特に日本の平均年間降水量は世界平均の約2倍と言われており、雨や霧に関連した課題に遭遇するケースが少なくありません。
例として、図1は急な降雨による気温低下と湿度上昇によってカメラのレンズ付近に水滴(結露)が付着し、光が回折することでカメラの画像にゴーストが生じている例です。

図2はLiDARが発する赤外線が空気中の水滴によって反射されることで、あたかも障害物が存在するように見えている例です。

これらの課題は日中の晴れた環境において生じることはほとんど無く、自然の環境変化によって偶発的に生じるため、対策の効果や再現性の確認、また体系的な評価を行うことが難しい領域となっています。
そのような状況を解決するための一つのアプローチとして、防災科学技術研究所(茨城県つくば市)との共同研究を通して、制御された悪天候環境下での技術開発を進めています。
本共同研究では図3に示すような車両を用いて、降雨強度、視程、照度といった環境パラメタのセンシング技術の開発と、環境パラメタとシステム性能の関係のモデル化にトライしています。

3、防災科学技術研究所との共同研究における実験内容の紹介
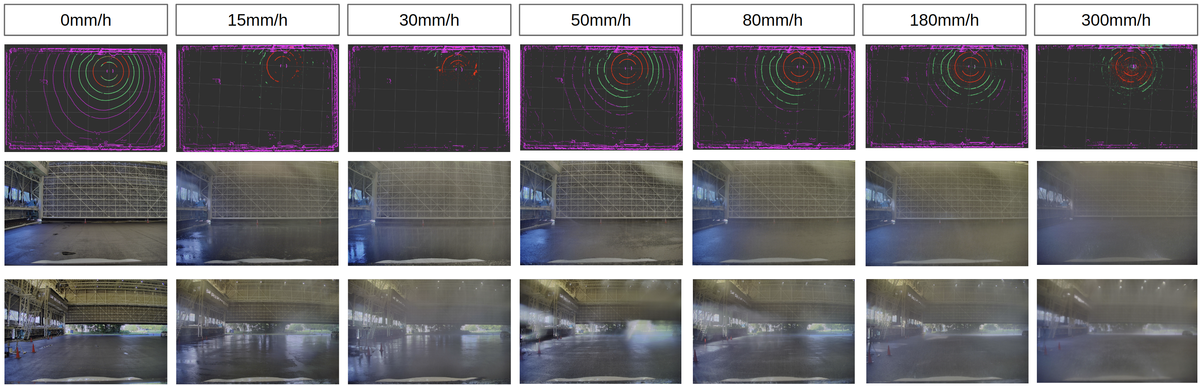
防災科学技術研究所の大型降雨実験施設は、天井に配置された直径の異なる4種類のノズルからの流量を個別に制御することで、雨粒の分布を制御しながら、降雨強度15(mm/h)から最大約300(mm/h)までの範囲 *4 で人工的に雨を降らせたり、霧を発生させることができます。また、地面からノズルまで約20(m)の高さがあるため、ノズルから吐出された水滴が落下に伴って拡散し、局在の少ないより自然の雨に近い環境を再現できるように設計されています。図4に降雨実験の様子を示しました。

図5に降雨強度を変更しながら取得したLiDAR点群(最上段、上面図)とカメラ画像の例を示します。今回実験に用いたLiDARは波長903nmの赤外線を周囲に向けて発し、物体からの反射光の位置と強度の情報をマッピングすることで3次元の情報を得ています。今回の例では降雨強度の値が大きい50(mm/h)よりも、細かい雨粒をより多く発生させた30(mm/h)の方がLiDARでの周囲認識の性能やカメラの視界が悪化する傾向が定性的に確認できました。また、図3に示した車両に搭載された計測機器で雨粒の落下速度や大きさの分布等も計測することができているため、上記の傾向を定量的に把握してモデル化するためのデータを蓄積することができています。
4、LiDAR点群による降雨強度推定
環境センシングの応用例として、自動運転車両で一般に使用されているLiDARの点群情報を用いて降雨強度を推定するモデルの開発事例を紹介します。雨粒の大きさや分布と赤外線の吸収や散乱強度の間には相関があることが知られており(参考文献1)、その相関を利用してBayesianモデリングの手法(参考文献2)に基づいてLiDAR点群(雨粒や周囲物体からの反射光の強度分布)と実測した降雨強度との関係をあらわす確率モデルを開発しています。Bayesianベースのモデルを用いることで推論結果の不確かさも同時に見積もることができるようになっています。
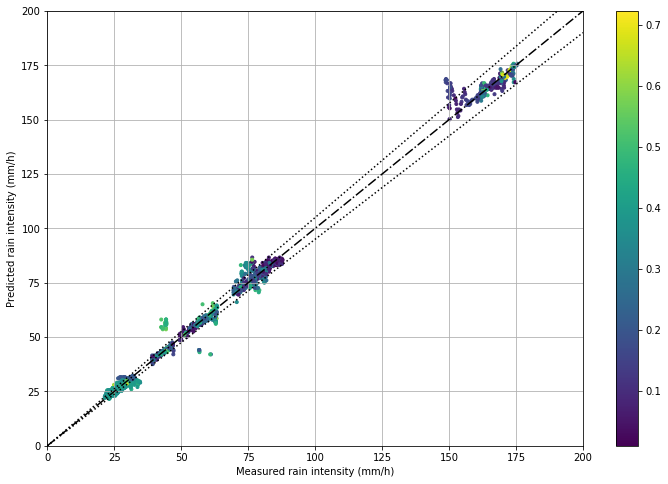
図6:開発中のモデルによる推論結果の例(プロットの色は真値が予め定めた±5%のエラー範囲の外に存在する可能性の大きさを示しています)
このように、制御された悪天候環境での系統的な評価やデータ収集を行うことで、自動運転で一般的に利用されているセンサを用いて環境パラメタの推定が行える例を示しました。このようにして得られる情報を用いて、自動運転システムを安全に運行させるために必須となる自己位置推定や物体認識といった機能の性能との対応を確認しながら、システム性能のモデル化を進めております。
今後は降雨強度だけでなく視程(MOR)、環境照度、路面の摩擦係数などODDを定義する上で重要な様々な環境パラメタに関して研究開発を進めていきます。
5、まとめ
以上、性能限界検知に関する環境センシングの開発事例をご説明させて頂きました。
ここまでで述べましたように、自動運転の技術開発はソフトウェアに関する部分だけではなく、自然現象に関するセンシング技術や物理解析といった分野でも多くの知見が必要となりますし、不確かさを定量的に扱うための数理的な素養なども必要になります(確率的な推論モデルの構築に関してはティアフォーのリサーチャーと共同で実施しています)。ロボットやソフトウェア開発がご専門でない方でも、我々と一緒に新しい技術開発にチャレンジしたいというパッションをお持ちの方は下のリンクより是非ご連絡頂ければ幸いです。カジュアル面談も随時受け付けております。
6.謝辞
この報告は、国立研究開発法人防災科学技術研究所との共同研究「悪天候環境における自立移動体の外界センシング性能の検証および向上等に関する研究」(令和2年度)の成果の一部です。特に、酒井直樹主任研究員、小林政美専門員には、降雨や実験に関する多くのご知見を共有頂きました。この場をお借りして深く感謝致します。
以上
(参考文献)
1: A First course in Atmospheric Radiation, Grant W.Petty, Sundog Publishing,p.346-, 2006
2: Pattern recognition and machine learning, Christpher M. Bishop, Springer, 2006