こんにちは、ティアフォーでVisual SLAMの研究開発をしている石田です。今回はVisual-Inertial Odometryという、カメラとIMU(慣性計測装置)を用いた経路推定手法を紹介し、これを自動運転に応用できた場合のインパクトと、応用までに乗り越えなければならない課題についてお話します。


なお、ティアフォーでは、「自動運転の民主化」をともに実現していく様々なエンジニア・リサーチャーを募集しています。もしご興味があればカジュアル面談も可能ですので以下のページからコンタクトいただければと思います。
自動運転における自己位置推定
自己位置推定とは、名前のとおり車両やセンサーデバイスなどが地図の中でどこにいるのかを推定するための技術であり、自動運転において欠かせない要素のひとつです。自分がどこを走っているか把握できなければ迷子になってしまいますし、自分が走っている場所の先に何があるか把握することも難しくなってしまいます。正確な自己位置推定が実現できれば、車両のスムーズな制御につなげることができて、さらに信号機や標識、停止線などの場所をあらかじめ地図に埋め込んでおき、車両がこれらに近づいたことを正確に検知できれば、安全かつ確実な制御を行うことができます。
自己位置推定の難しさ
自己位置推定の課題は大きく分けて3つあります。1つ目は精度、2つ目はロバスト性、そして3つ目はこれらを小さい計算量で達成することです。
公道を走る車両の自己位置推定は少なくとも数十センチの精度が要求されます。この精度を達成できないと、走行レーンをはみ出したり他車にぶつかったりしてしまいます。
自動車は様々な環境や場所を走るため、自動運転車に搭載される自己位置推定システムも正確な動作が必要となります。市街地も森も田園も橋の上も安全に走れる必要がありますし、雨や雪が降っていても正確に動作する必要があります。このように様々な場所や環境で動作する能力は「ロバスト性」と呼ばれ、精度と同様に自己位置推定手法における重要な指標とされています。
計算量を抑えることも重要な課題のひとつです。自分の位置を計算するのに1秒かかっていたら、その間に車が動いてしまい、周囲の物体にぶつかってしまいます。しかし、計算を高速化させたいからといって車に巨大なコンピュータを積むと、車両の価格が上がったり、膨大なエネルギーを消費したり、コンピュータの周囲が高温になってしまいます。このため、自動運転のための自己位置推定手法は小さいコンピュータでも高速に動作しなければなりません。
高精度で、ロバストで、ライトな自己位置推定を実現する。これが我々の仕事です。
自己位置推定を実現するためのセンサー
自己位置推定を実現するためのセンサーには様々なものが存在します。皆さんにとって最も身近なものは、おそらくスマートフォンやカーナビに搭載されているGPSでしょう。しかし、皆さんもご存知のようにGPSは屋内などではうまく動作できないうえ、自動運転に使えるほどの精度が常に実現できるわけではありません。
現在のティアフォーの自動運転車は主にLiDARというセンサーを用いています。LiDARはレーザー光によって周囲の形状を把握するセンサーで、LiDARによって得られた車両の周囲の形状と、あらかじめ作成しておいた点群地図を照合することで、車両の位置を高い精度で推定することができます。しかし、LiDARにも弱点があります。LiDARを用いた自己位置推定手法は主に周囲の環境の構造情報を頼りにしているため、特徴的な構造が観測しづらい場所、たとえば田園などではうまく動作できません。また、性能のよいLiDARは非常に高価で数千万円もしてしまうため、これをそのまま自動運転車に用いると、車両も同様に高価になり自動運転車の普及の妨げになってしまいます。したがって、自動運転の実用化および普及促進のためには、LiDARだけに頼るのではなく複数の安価なセンサーを組み合わせることが不可欠です。
ここで今回私が紹介するVisual-Inertial Odometryの出番です。Visual-Inertial Odometry(VIO)とは、カメラとIMU(慣性計測装置)を使って移動経路を求める手法です。
カメラはスマートフォンにも搭載されていますし、昨今のリモートワークでお世話になっている方も多いでしょう。もしかしたら毎日使っている方もいるかもしれません。IMUもカメラと同様に多くのスマートフォンに搭載されているのですが、こちらは馴染みのない方もいらっしゃるかと思います。IMUは人間における三半規管のようなもので、加速度と回転速度を計測することができるセンサーです。皆さんは車やバスに乗っているとき、目を閉じても車が加速しているのか減速しているのか、右に曲がっているのか左に曲がっているのかを、大まかに感じ取ることができると思います。IMUもこれと似ていて、物体の加速度や回転速度を計測することができ、この情報をもとにしてセンサーがどの方向にどれぐらい動いたかを大まかに計算することができます。これらのセンサーから得られる情報を組み合わせて移動経路を推定するのがVisual-Inertial Odometryです。
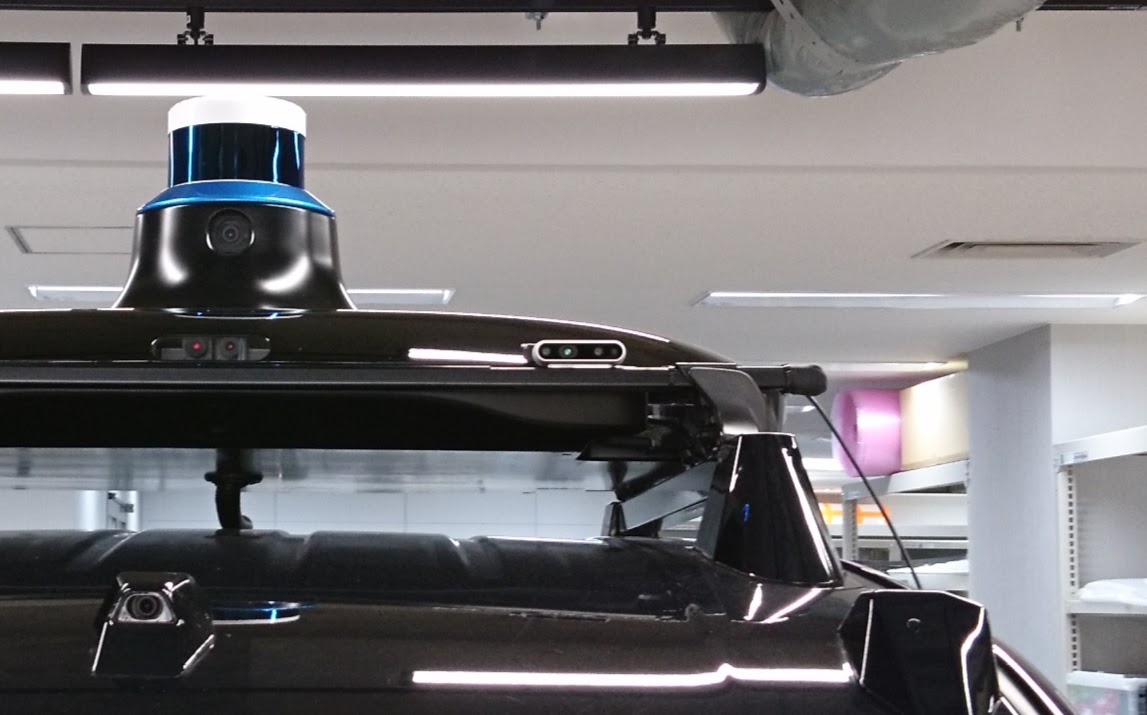
VIOに用いられるセンサーの一例。画像中央にある小型の横長のものがカメラとIMUが一体になったもの。画像で示されているのは検証用のものであり、実際の制御に用いられているものではない。画像左上に見えている筒状のものがLiDARであり、こちらは形状ベースの位置推定に利用される。
カメラやIMUはほとんどのスマートフォンに搭載されている非常にありふれたセンサーです。自動運転車に利用するためにはより高信頼なものが必要になるものの、それでも数万円から数十万円で調達することができます。VIOはLiDARベースの手法と比べるとまだまだ精度やロバスト性の点で劣るため、いますぐLiDARに置き換えられるというものではありません。しかし、カメラやIMUから得られた情報を組み合わせれば、同じ性能の自己位置推定をより安価なLiDARで実現できる可能性があります。結果として、車両全体の価格を押し下げることができ、自動運転の迅速な普及に貢献することができます。
Visual-Inertial Odometryの具体的な手法
VIOはすでに多くの研究がなされており、様々な手法が存在します。今回紹介するのは、現在私が性能検証を行っている、VINS-FusionというVIOの手法です。VINS-Fusionを選定した理由として、VIOの手法の中では精度が高いこと、他のセンサーと組み合わせやすいこと、計算量を抑える仕組みが導入されていることが挙げられます。ここでは、VINS-Fusionの手法の特徴を大まかに解説し、安心安全な自動運転を実現するために必要な研究と今後の開発についてお話します。
手法の特徴
VINS-Fusionは、センサーの観測値を用いてあるエラー値を算出し、それをできるだけ小さくするようなセンサーの姿勢を求めることで、センサーの移動経路を推定します。たとえば、ある静止した物体を見ているとき、カメラが近くにいるならその物体は大きく見えますし、カメラが遠くにいるなら小さく見えるはずです。カメラが遠ざかっているのにその物体がだんだん大きく見えるようになるのはおかしいですよね。IMUについても同様で、IMUに対して加速度が前にかかっているなら、IMUは前に進んでいるはずです。加速度が前にかかっているのに、IMUが後ろに進んでいるなら、これもやはりおかしいです。この「おかしさ」を数値にし、それができるだけ小さくなるようなセンサー姿勢を求めるのがVINS-Fusionのアプローチです。物体が徐々に大きく見えるようになっているとき、「カメラが物体に近づいている」と推論すればこの「おかしさ」の数値は減っていきます。同様に、IMUが前向きの加速度を検知しているとき、「IMUは前に進んでいる」と推論すればやはりこの「おかしさ」の数値は減っていきます。このように、物理現象とつじつまが合うように「おかしさ」の数値を設計し、それが減るようなセンサーの姿勢を求めるのがVINS-Fusionの戦略です。
計算量を減らすための工夫
1. IMU積分値近似
VINS-Fusionのアプローチは、先ほどの「おかしさ」を徐々に減らしながらセンサーの姿勢を調節するため、一般に計算コストが高いとされています。この問題を解決するため、VINS-Fusionにはこの「おかしさ」を高速に計算するためのIMU積分値近似という仕組みが備わっています。
IMUで観測された加速度や回転速度はしばしば実際の値よりも少し大きく、あるいは小さく出力されます。これはIMUの特性上どうしても起きてしまうもので、VIOの開発者たちはがんばってこのズレを補正することで、実際の値にできるだけ近い観測値を得ようとします。
観測値と実際の値のズレは先ほどの「おかしさ」を計算するときに問題になります。「おかしさ」を計算するためにはIMUの観測値を積分して、IMUが進んだ距離を計算する必要があります。たとえば、「今はIMUから1.0という加速度が観測されているから、1秒間に8.0cm進んでいるはずだ。でも姿勢推定システムは1秒間に6.0cm進んでいると考えているから、おかしさは2.0cmだな!」というふうに考えるわけです。しかし、観測値のズレを補正するということは、距離計算の入力値(加速度や回転速度、先ほどの例だと1.0という数字)が変わることに相当するので、観測値の補正を行うたびに進んだ距離の計算をやり直さなければならなくなってしまいます。「さっきは加速度1.0で計算したけど本当は1.2なの?じゃあ今何cm進んでいるんだろう...」という計算を何度も何度も繰り返さなければならなくなってしまうのです。冒頭で述べたように、VIOは小さい計算コストで高速に動作することが求められるので、この計算に時間を取られてしまうと実用化の大きな支障になります。そこでVINS-Fusionは、この計算を近似的に行うことで処理の高速化を図っています。たとえば、「加速度を+0.1補正したら進む距離が0.4cm増える。ならば、加速度を+0.2補正したら進む距離は0.8cm増えるだろう」というように、非常に大まかに、しかし高速に計算を行います。これにより、姿勢推定全体を高速化することができます。
2. キーフレーム選択
動画撮影用のカメラは1秒間に何枚ものフレームを撮影することができます。たとえばiPhoneのビデオ機能は1秒間に30フレーム撮影しているそうです。では1秒間に30回撮影されるフレームそれぞれについて、位置や姿勢を推定する必要があるでしょうか。カメラが高速に移動していれば、たしかにそうかもしれません。では、静止している場合はどうでしょうか。静止しているなら、1秒間に30回も姿勢推定を行う必要はありませんね。VINS-Fusionをはじめ、多くのVIOには、キーフレーム選択と呼ばれる「大きく動いたときにだけフレームの姿勢を推定する」という機能が備わっています。このように、必要なときのみ姿勢推定を行うことで実行速度を上げることができます。また、余った計算コストを必要な部分に振り分けることで、精度も高められるというわけです。
これから
最後に、VIOの今後の課題と将来性についてお話して、記事の締めくくりとします。
他のセンサーとの組み合わせ
VIOはまだまだ発展途上の技術であり、精度やロバスト性はLiDARベースの自己位置推定手法におよびません。しかし、VIOをLiDARベースの手法と組み合わせることで、お互いの弱点を補いあい、強みを活かすことができます。たとえば、VIOはカメラ画像を入力とするため、対向車のヘッドライトのような大きな照度変化に影響されやすいという弱点があります。一方でLiDARはレーザー光で周囲の形状を把握するセンサーなので、明るさの変化の影響をほとんど受けないという特性があります。したがって、VIOとLiDARを組み合わせることで、様々な環境で安定して動作する自己位置推定システムを作ることができます。現在私はこういったセンサーの組み合わせに取り組み始めているところです。
動けないときに「動けない!」と言ってくれる自己位置推定
霧や大雨の中では、人間でさえ安全な運転が難しいと感じることがあり、これは皆さんも経験したことがあるかもしれません。同様に、自己位置推定の手法も環境によっては確実に動作できないことが考えられます。こういったときに無理に自己位置推定を行って危険な走行をするのではなく、「動かない!」と言って停止することも自動運転車の大事な機能です。VIOはまだまだ普通の環境でしっかり動くことを目指す段階なので、このような停止判断機能はもう少し先の話になりますが、高信頼な自動運転を実現するためにはいずれ取り組まなければならない課題です。
誰もが安心して乗れる車を実現するために
Visual-Inertial OdometryはAR(Augmented Reality、拡張現実)などではすでに実用化されているものの、自動運転に応用するためにはまだまだ多くのハードルを乗り越えなければなりません。様々な環境で正確かつ高速に、しかも高信頼に動作する自己位置推定手法を開発するのは、非常にチャレンジングでワクワクするものです。もしこのような仕事にご興味ある方がいましたら、改めてにはなりますが、以下のページからご応募ください!!